
Robot Operating System

El Sistema Operativo de Robots (ROS) es un marco de software ampliamente utilizado en robótica para desarrollar aplicaciones de manera modular, escalable y eficiente. A pesar de su nombre, ROS no es un sistema operativo tradicional como Linux o Windows; en cambio, es una colección de herramientas, bibliotecas y convenciones diseñadas para simplificar la creación de software para robots.
ROS proporciona una infraestructura que facilita la comunicación entre diferentes componentes de un sistema robótico. Permite a los desarrolladores enfocarse en tareas específicas sin preocuparse por los detalles de la integración, como la transmisión de datos, la sincronización o la interoperabilidad entre módulos. Este enfoque modular se logra mediante conceptos clave como nodos, mensajes, y temas, que estructuran la interacción entre los diferentes subsistemas.
Lanzado por Willow Garage en 2007 en el Laboratorio de Inteligencia Artificial de Stanford (como proyecto “switchyard”), ROS se ha convertido en el estándar de facto en la investigación y desarrollo de robótica, gracias a su amplia comunidad y la flexibilidad que ofrece a los desarrolladores. Es compatible con múltiples lenguajes de programación, incluyendo Python y C++, lo que lo hace accesible para una gran variedad de usuarios.
Este sistema facilita la comunicación entre componentes de un robot mediante un enfoque distribuido, donde los diferentes módulos pueden operar de manera independiente y comunicarse a través de una arquitectura basada en mensajes. ROS también ofrece herramientas avanzadas para la simulación de robots, el control de movimiento, la percepción sensorial y la integración de algoritmos de inteligencia artificial.
¿Qué es el sistema operativo robot (ROS)?
El Sistema Operativo de Robots (ROS) es un marco flexible de código abierto diseñado para desarrollar software de robots. Se trata de un sistema de middleware basado en otros sistemas operativos que proporciona un conjunto de herramientas, bibliotecas y paquetes para crear código modular y reutilizable. Esto permite a los programadores compartir información sobre sus conocimientos previos para centrarse en el desarrollo de lo que desconocen y evitar tener que construir todo desde cero.
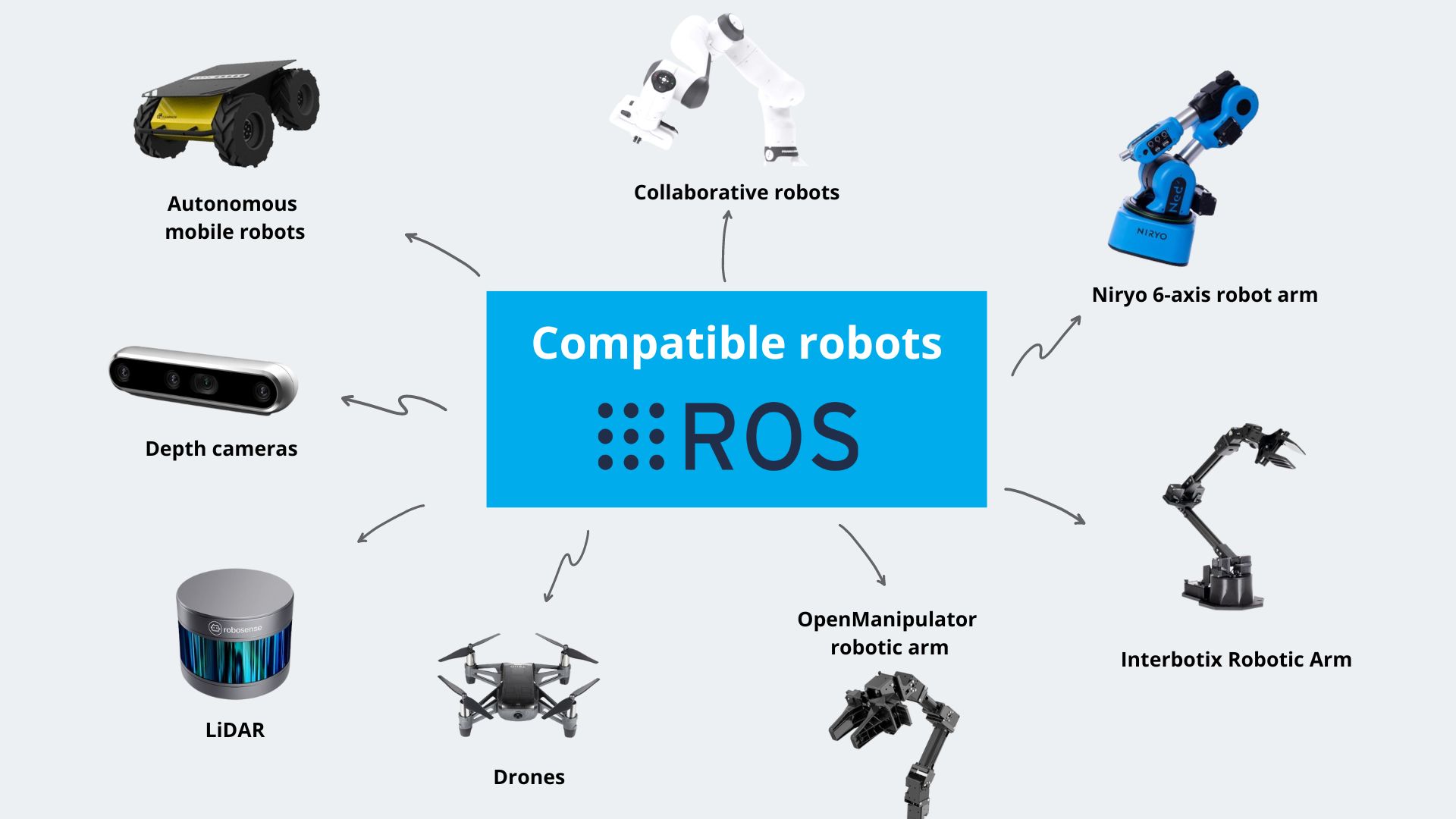
Figura # 2 Génération Robots. (2016, marzo 26). ROS – Robot Operating System [Imagen]. Génération Robots. https://www.generationrobots.com/blog/en/ros-robot-operating-system-2/
ROS utiliza principalmente C++ y Python, pero también puede admitir otros lenguajes, como Java y Lisp, a través de bibliotecas e interfaces complementarias.
Características principales
- Código abierto y modular
- Gran comunidad de usuarios
- Compatibilidad con hardware variado
- Herramientas de simulación
- Gestión eficiente de sensores y actuadores
Ventajas
- Código abierto
